Can we improve complex systems research with rapidly prototyped robotics?
Year: 2017
Solo Project
Skills: behavioral science reactive co-design with stakeholders, rapid manufacturing, code/electronics, novel sensing development
Client: Bristol Ant Lab @ University of Bristol
Awards: BAE Systems prize for best computer science project 2017
#complex systems #robotics #rapid prototyping
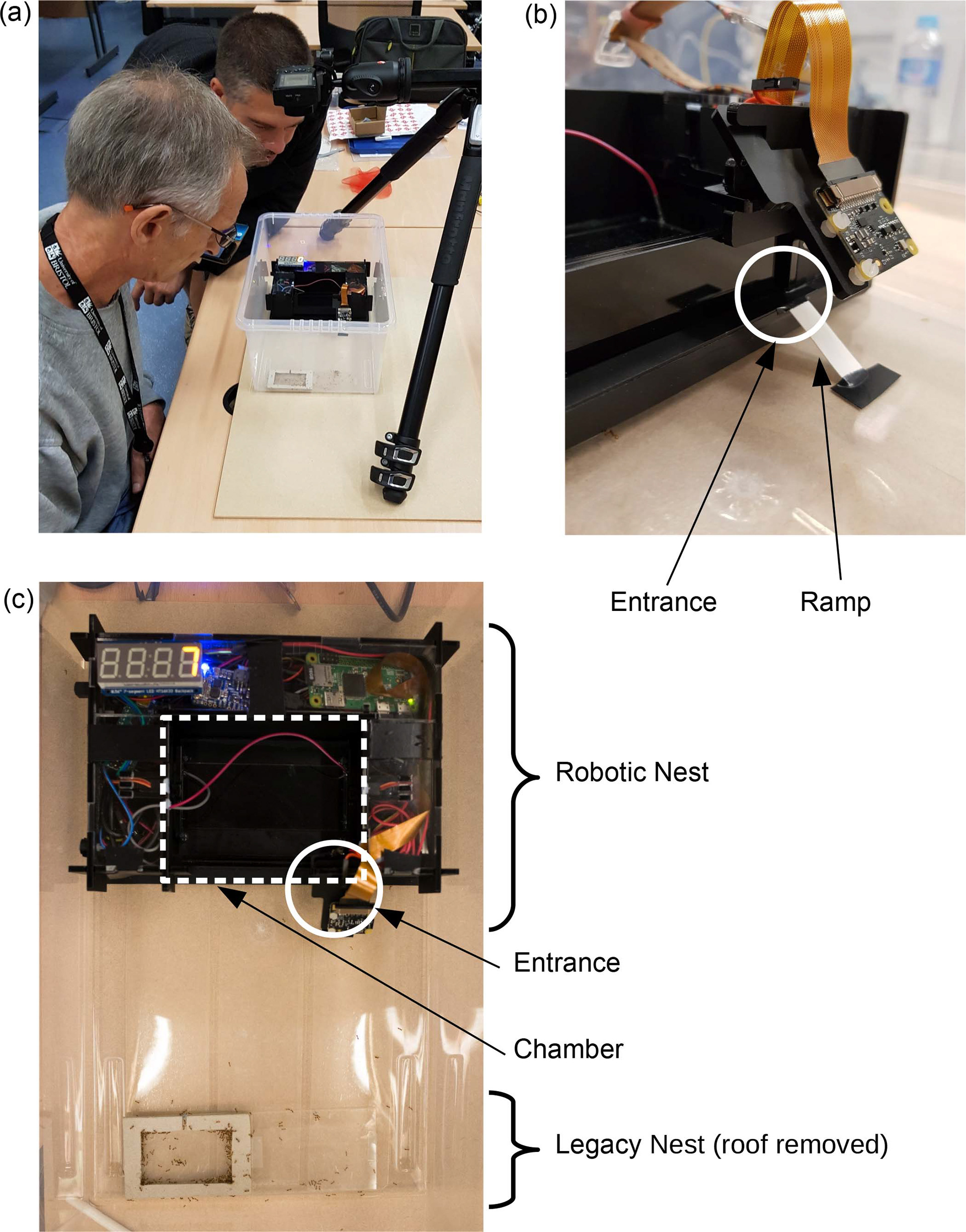
The Ant Lab at the University of Bristol had been carrying out leading research into the behavior of ant colonies during migration, but their experimental methods had been limited to the use of very basic artificial nests made from paper and glass.
This equipment made experiments slow, difficult, and imprecise; three things that can usually be helped with robotics.
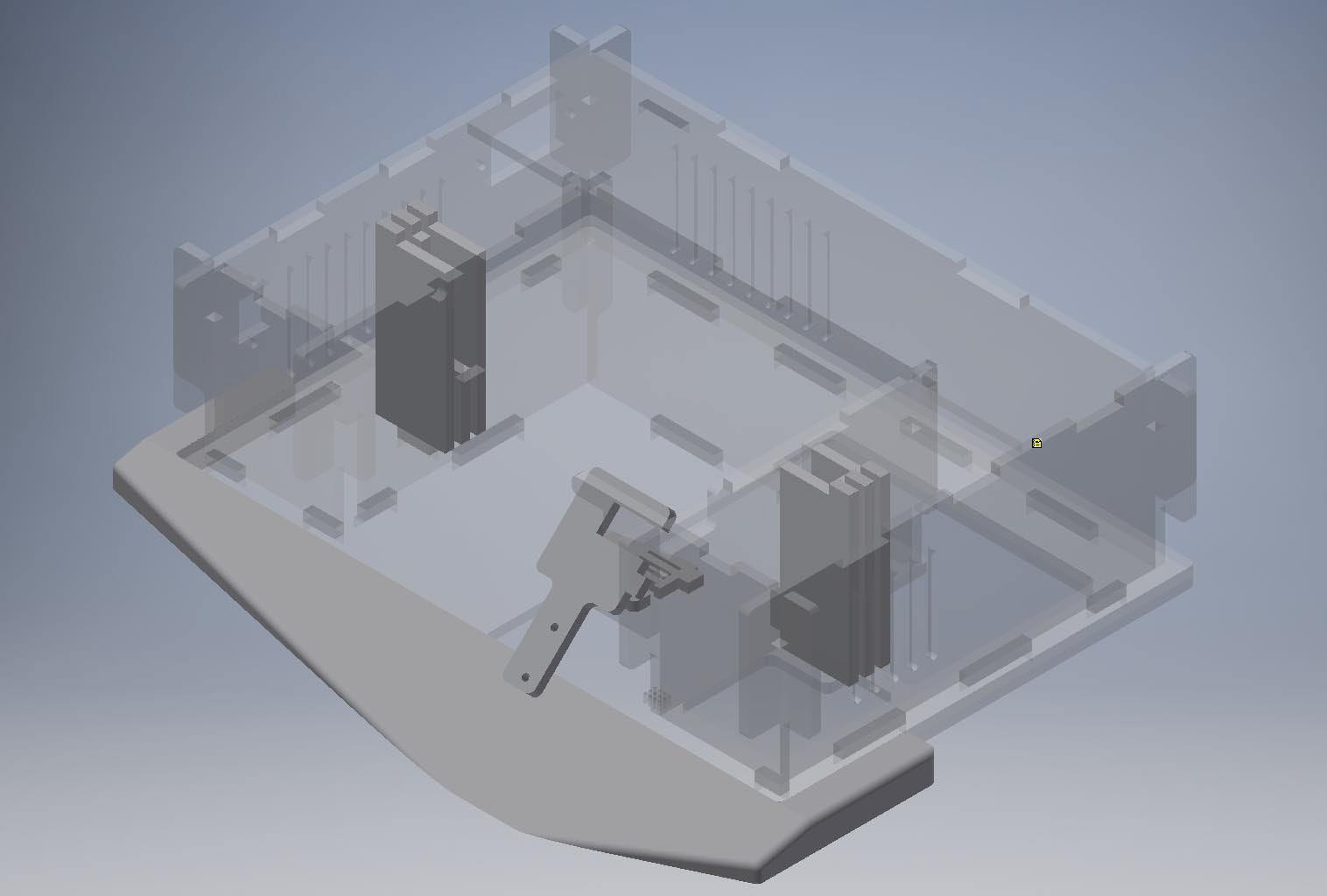
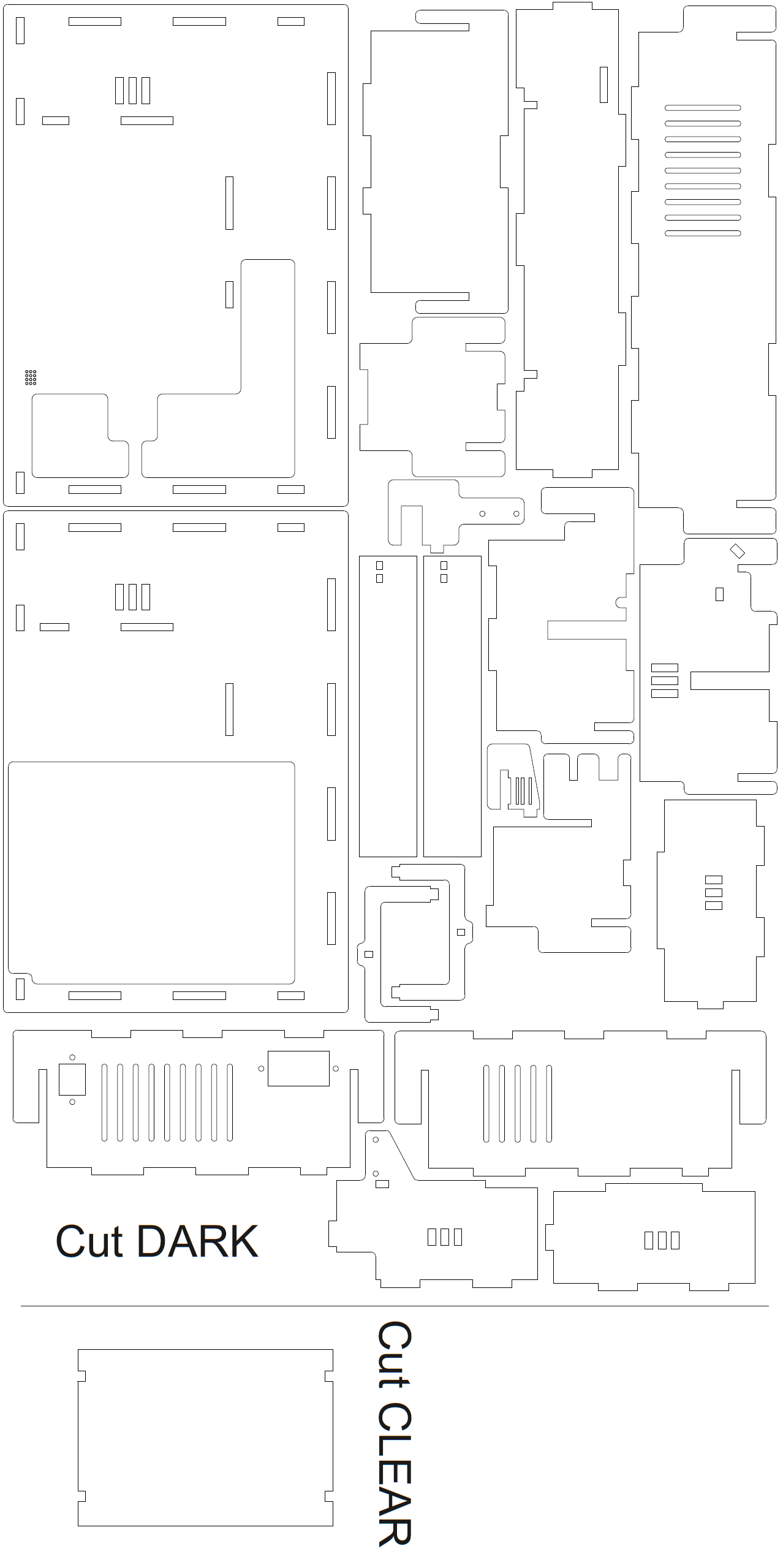
So I tried to solve all their issues in one modular framework, and investigate the viability of rapidly prototyped lab equipment on the way.
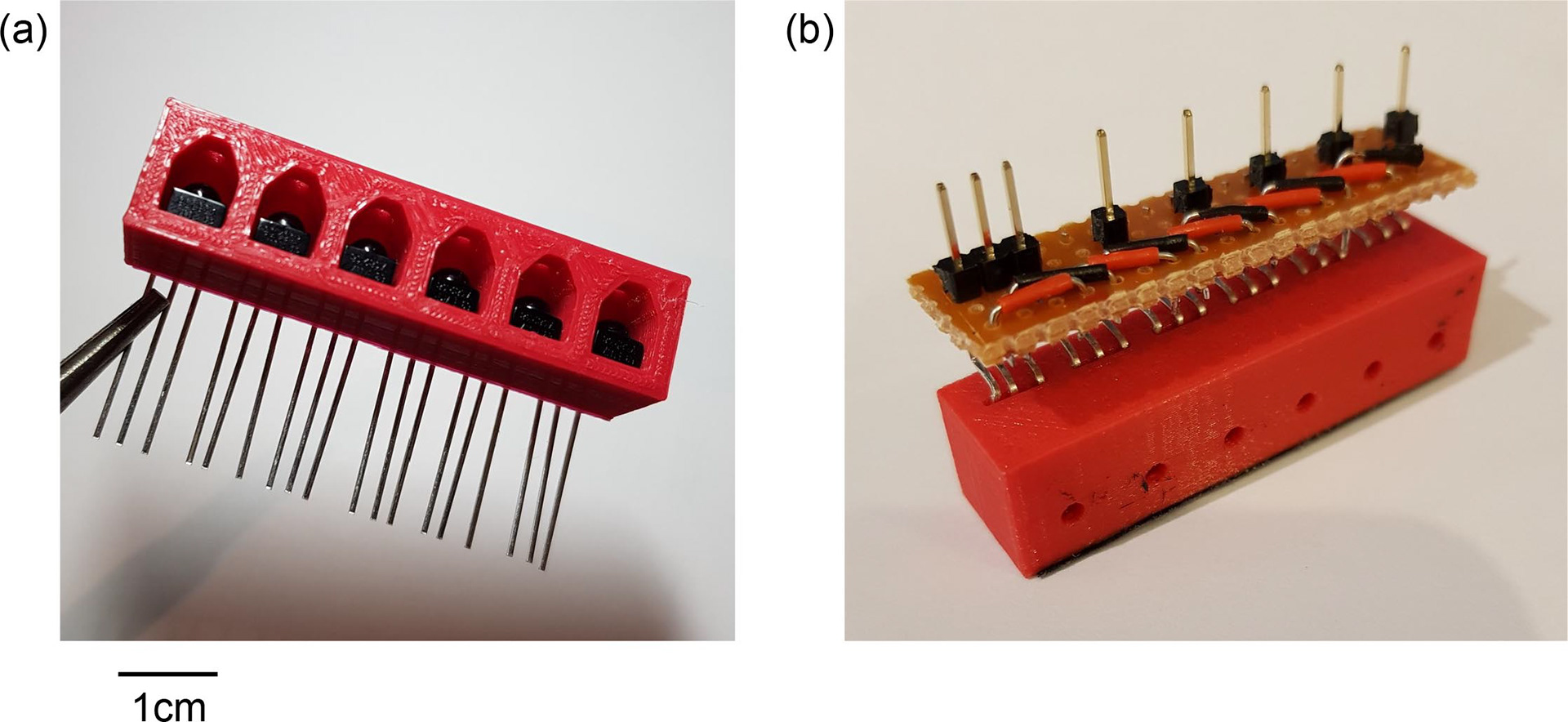
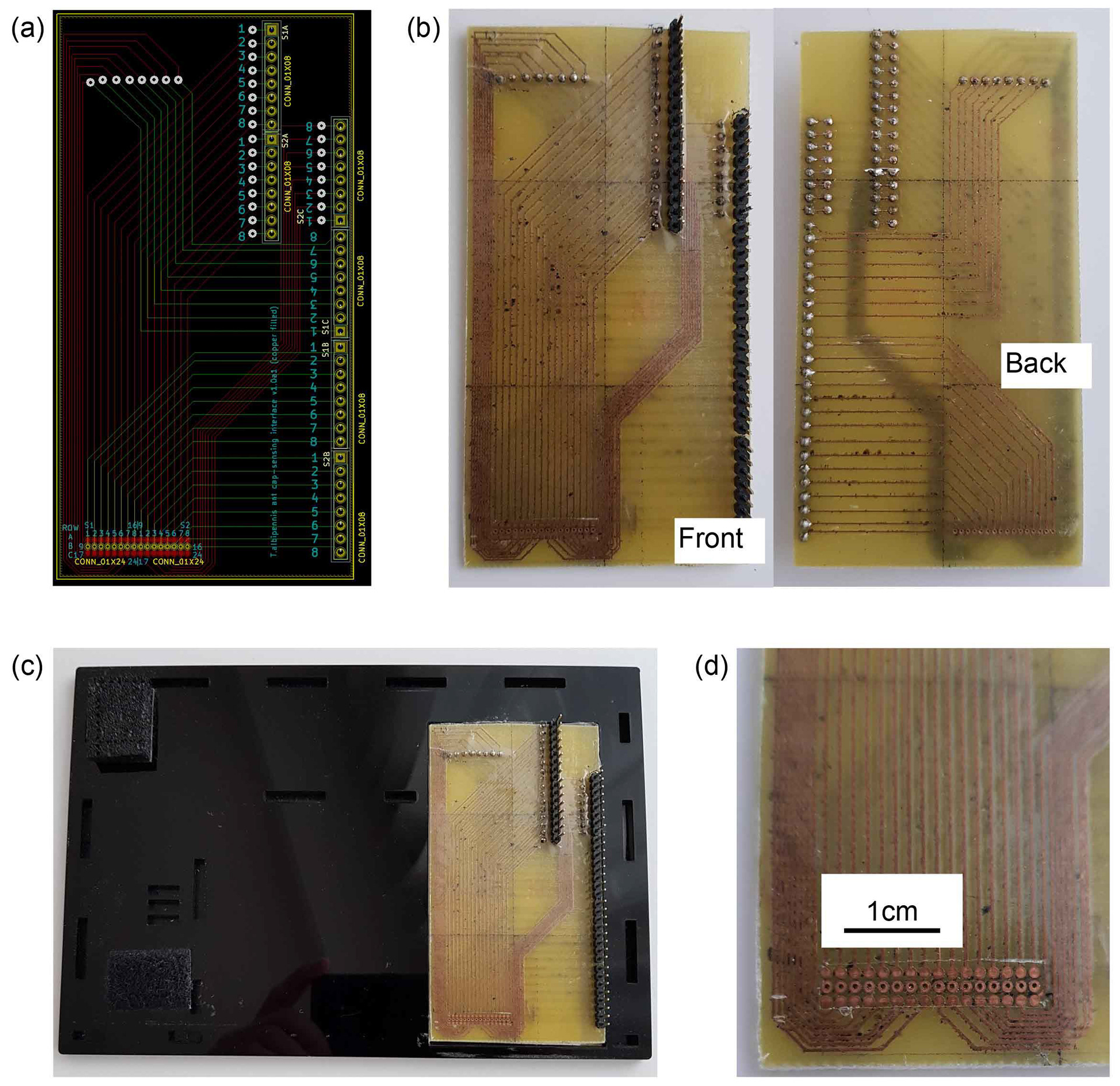
The initial brief was to investigate robotic solutions to enable height and entrance width dimensions of an artificial ant nest to be changed on the fly. This would help with complex systems research done within the Ant Lab on colony behavior. However, I quickly expanded this project into a full modular framework of robotic systems that could be rapidly manufactured and assembled with tools available to the lab.
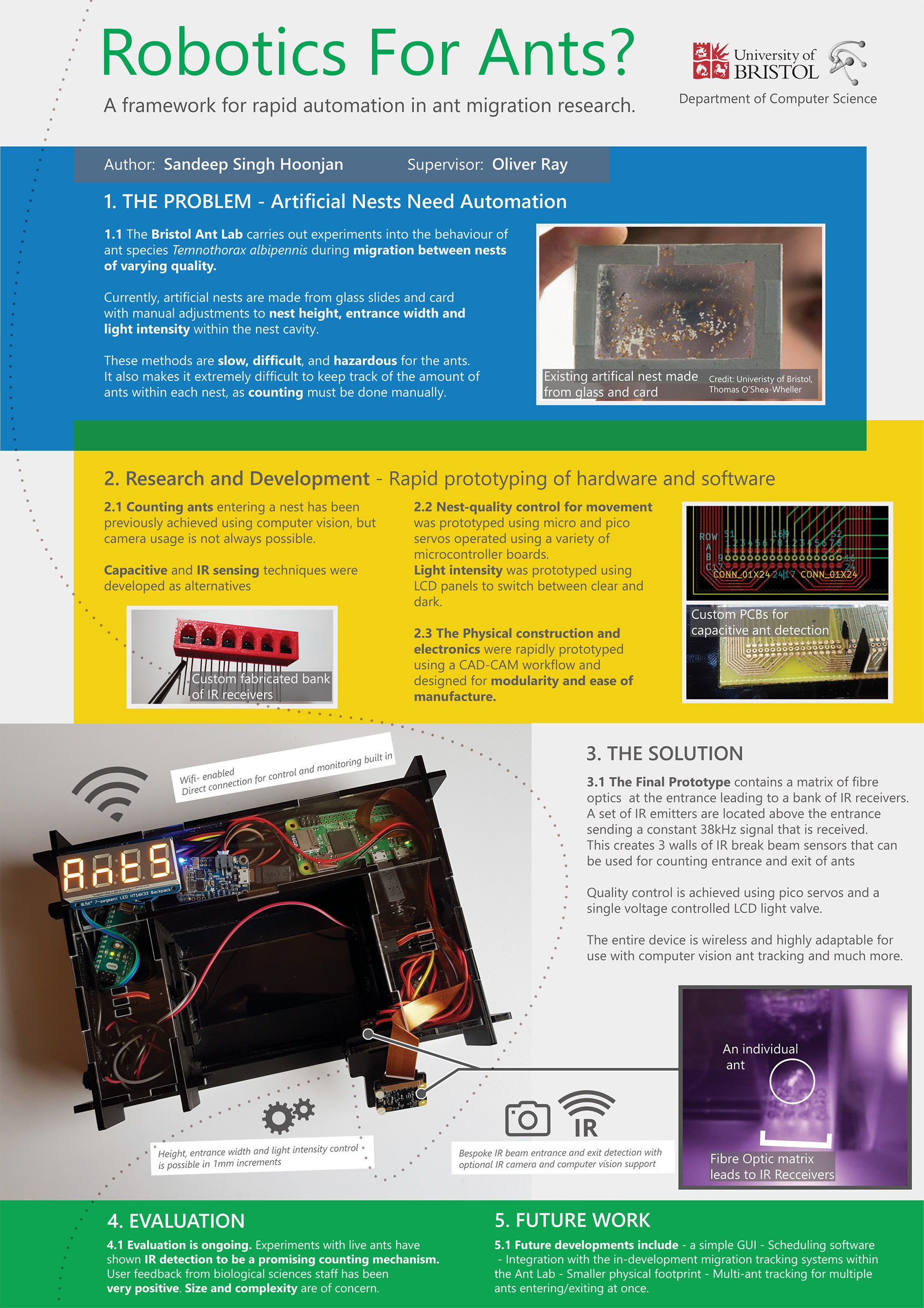
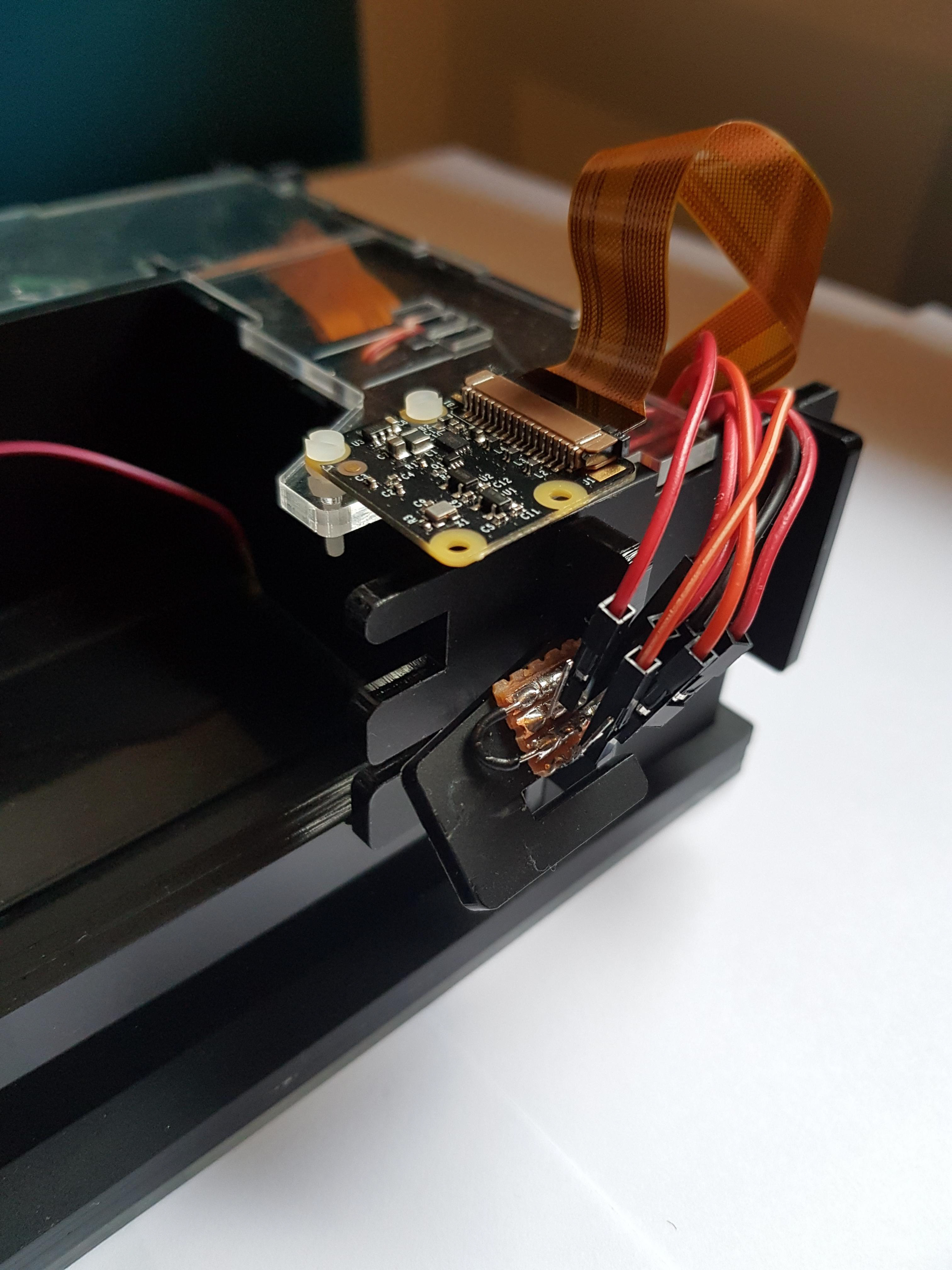
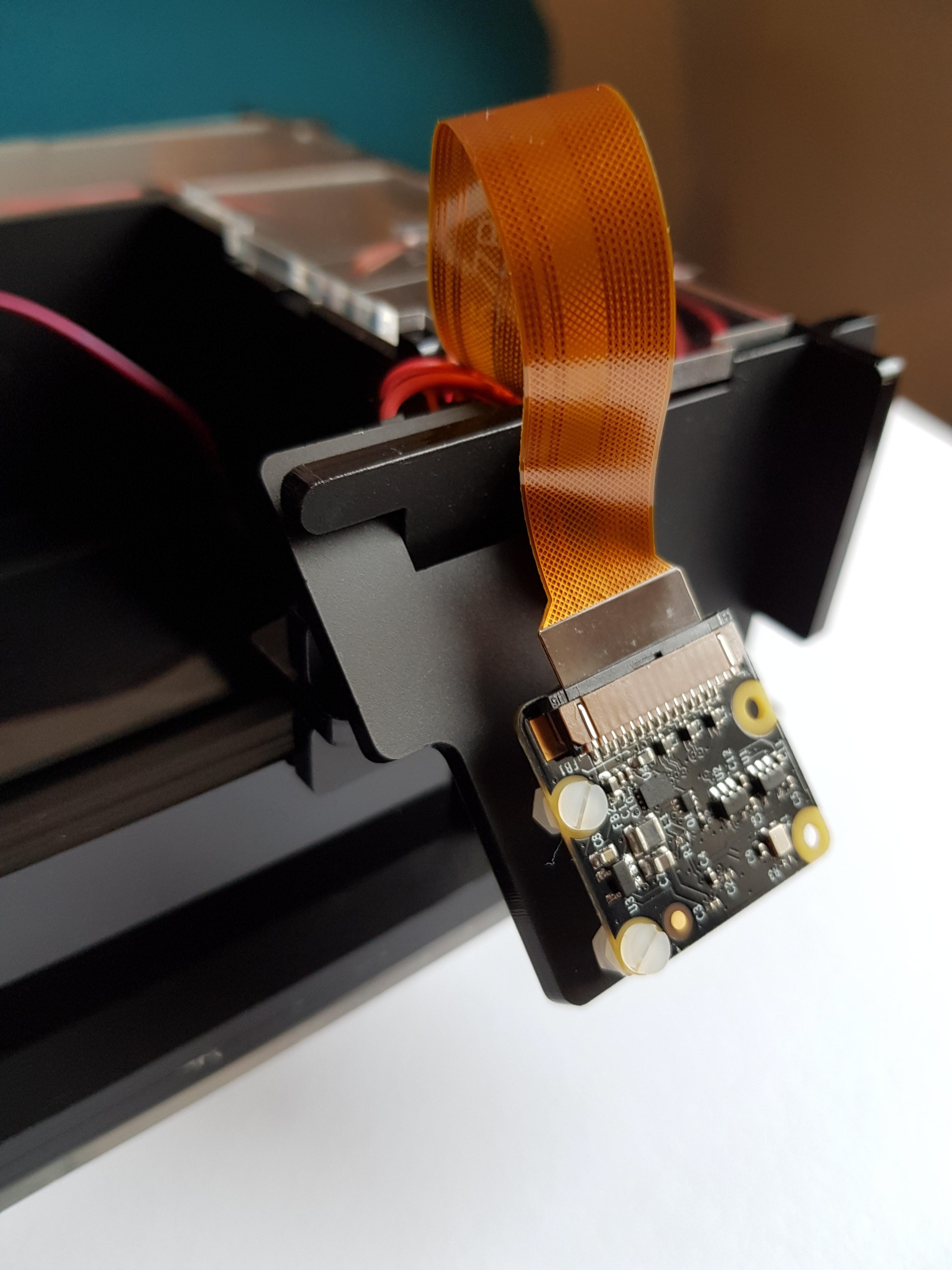
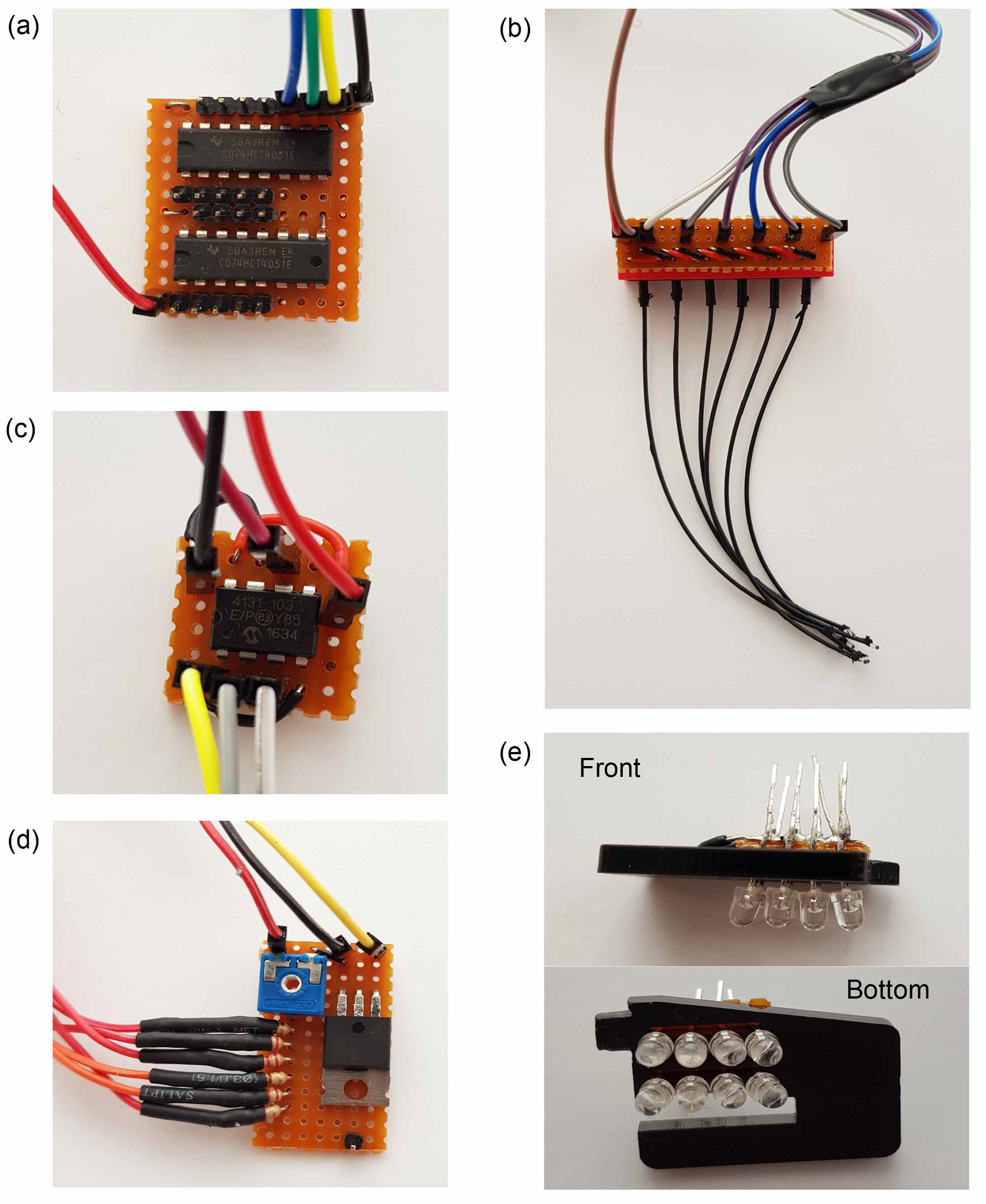
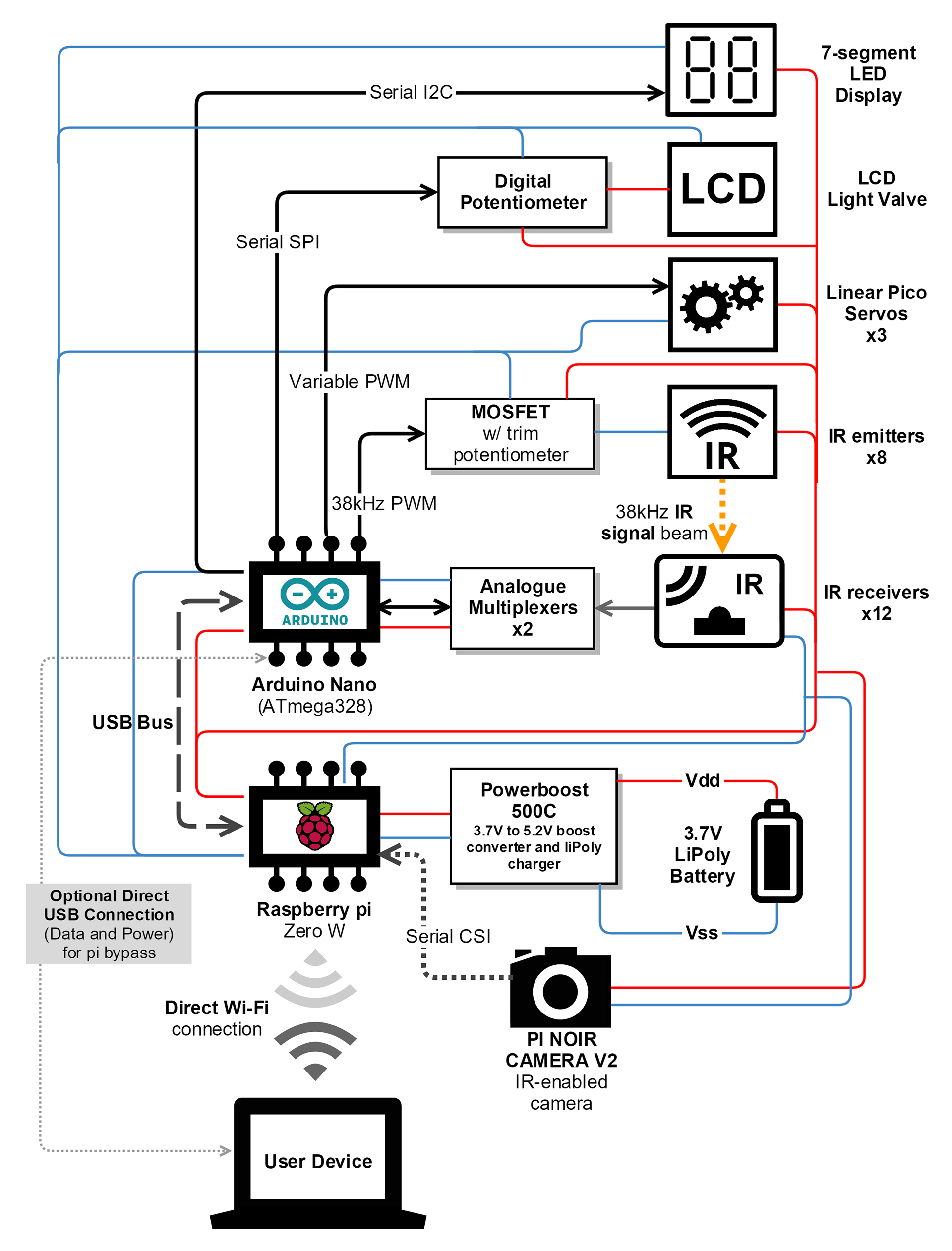
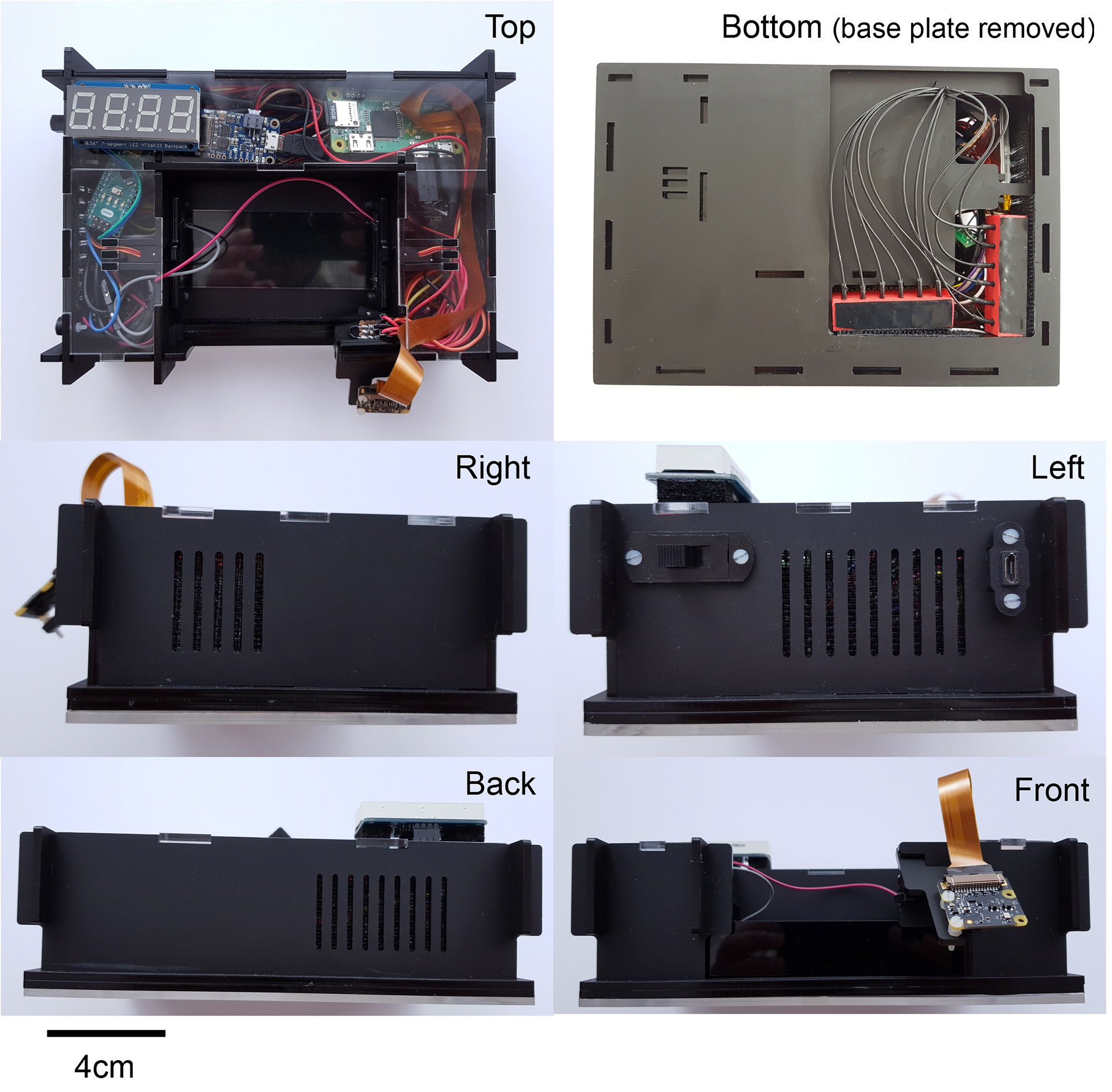
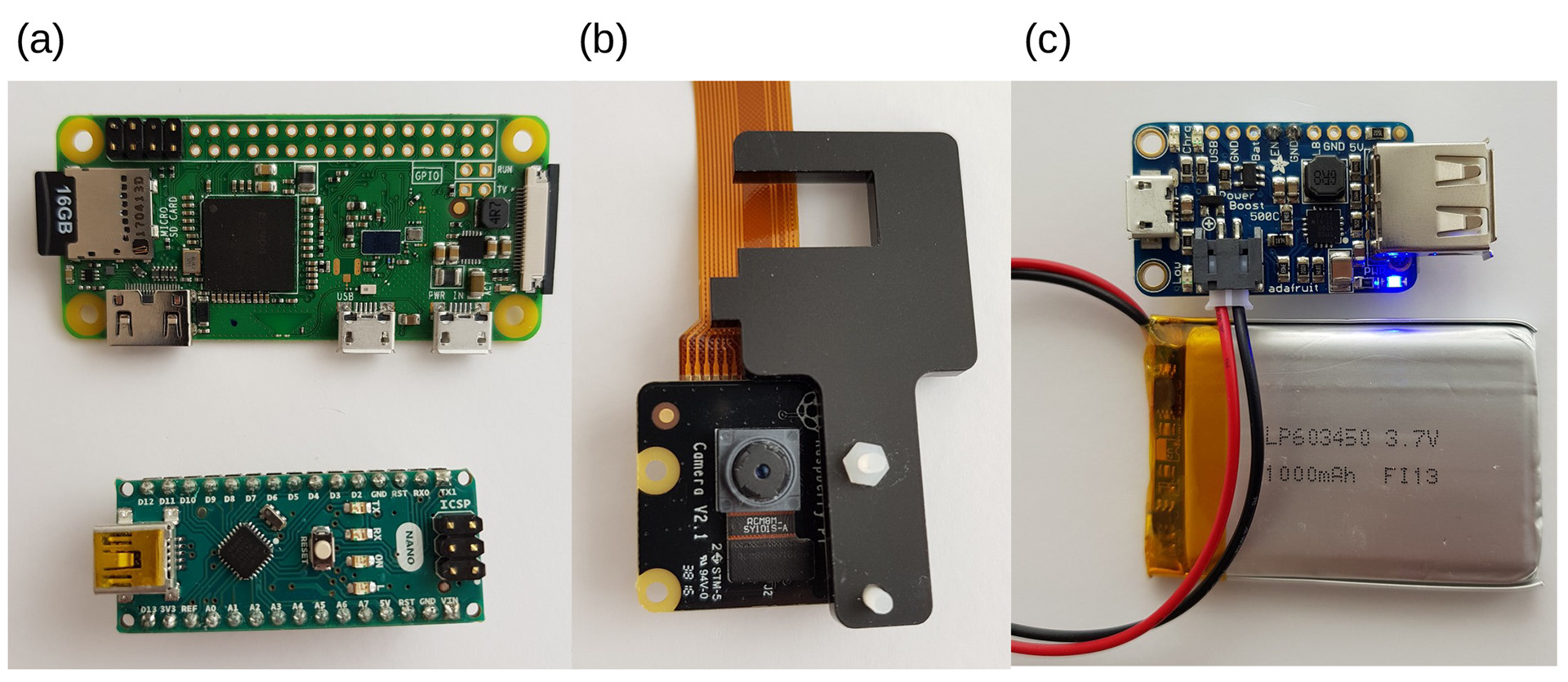
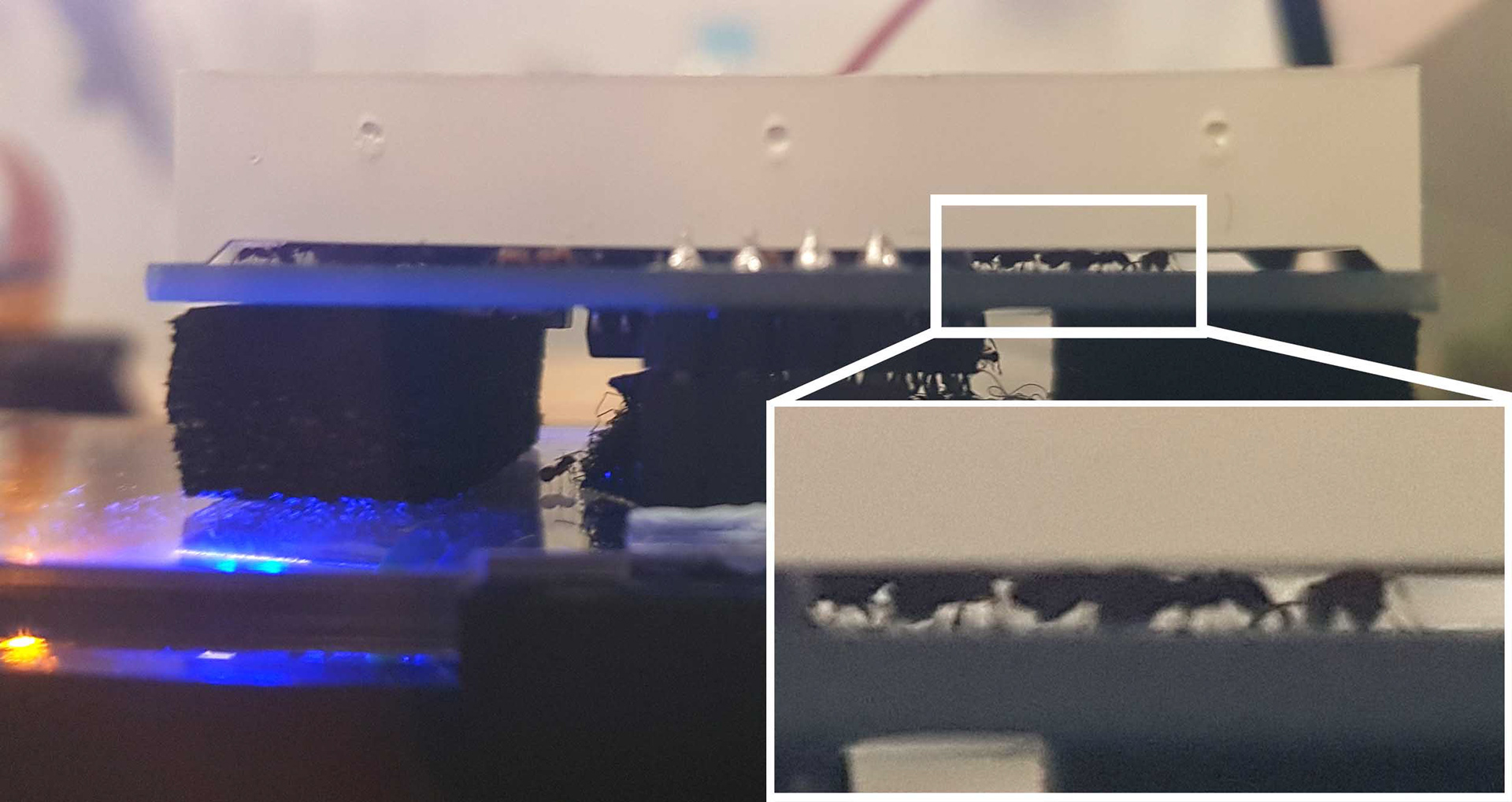
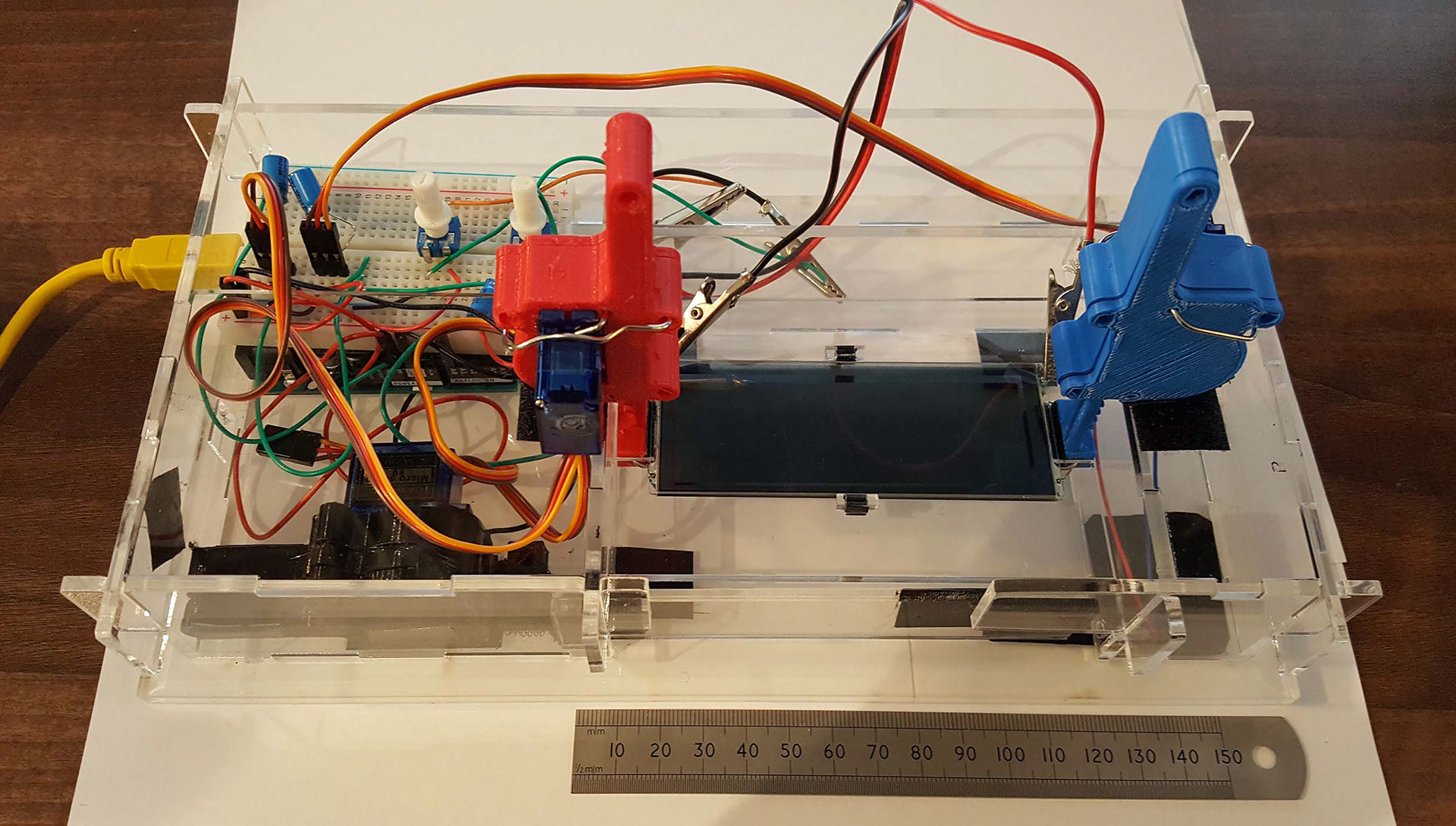
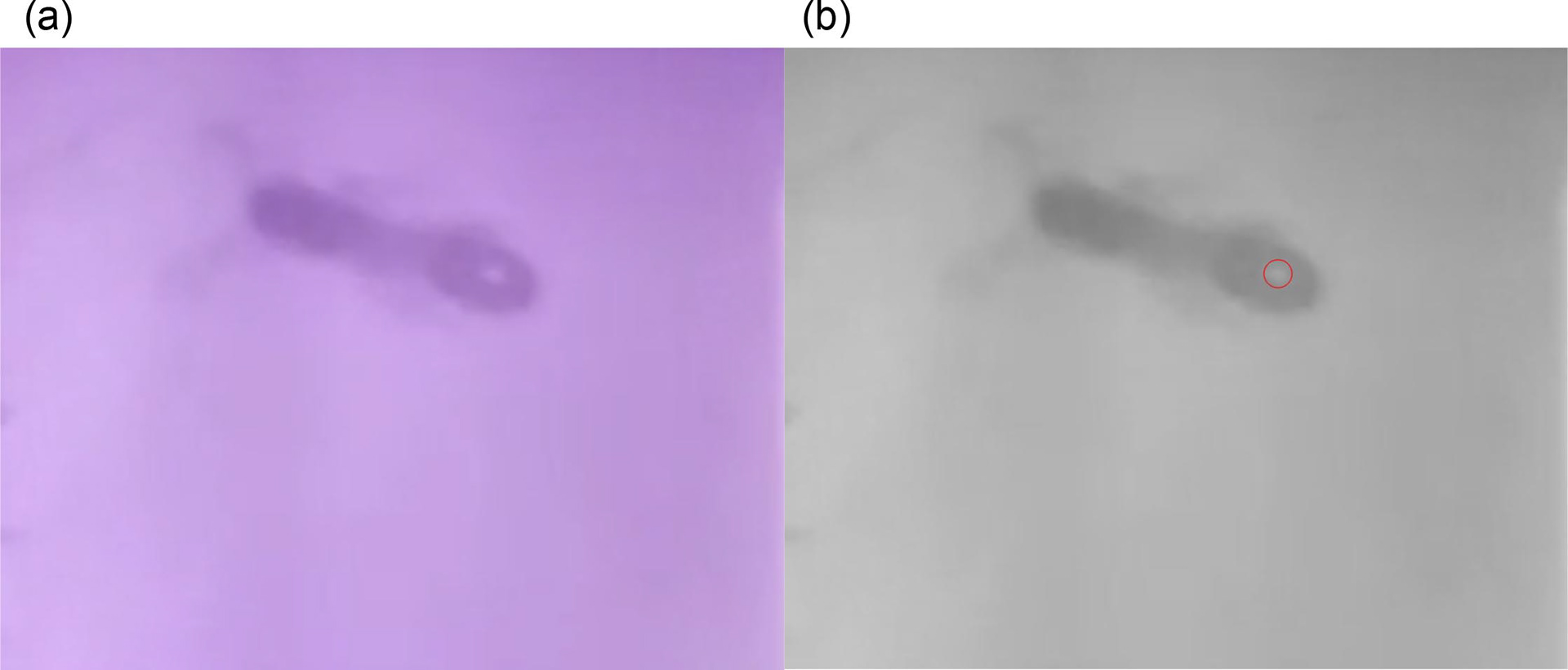
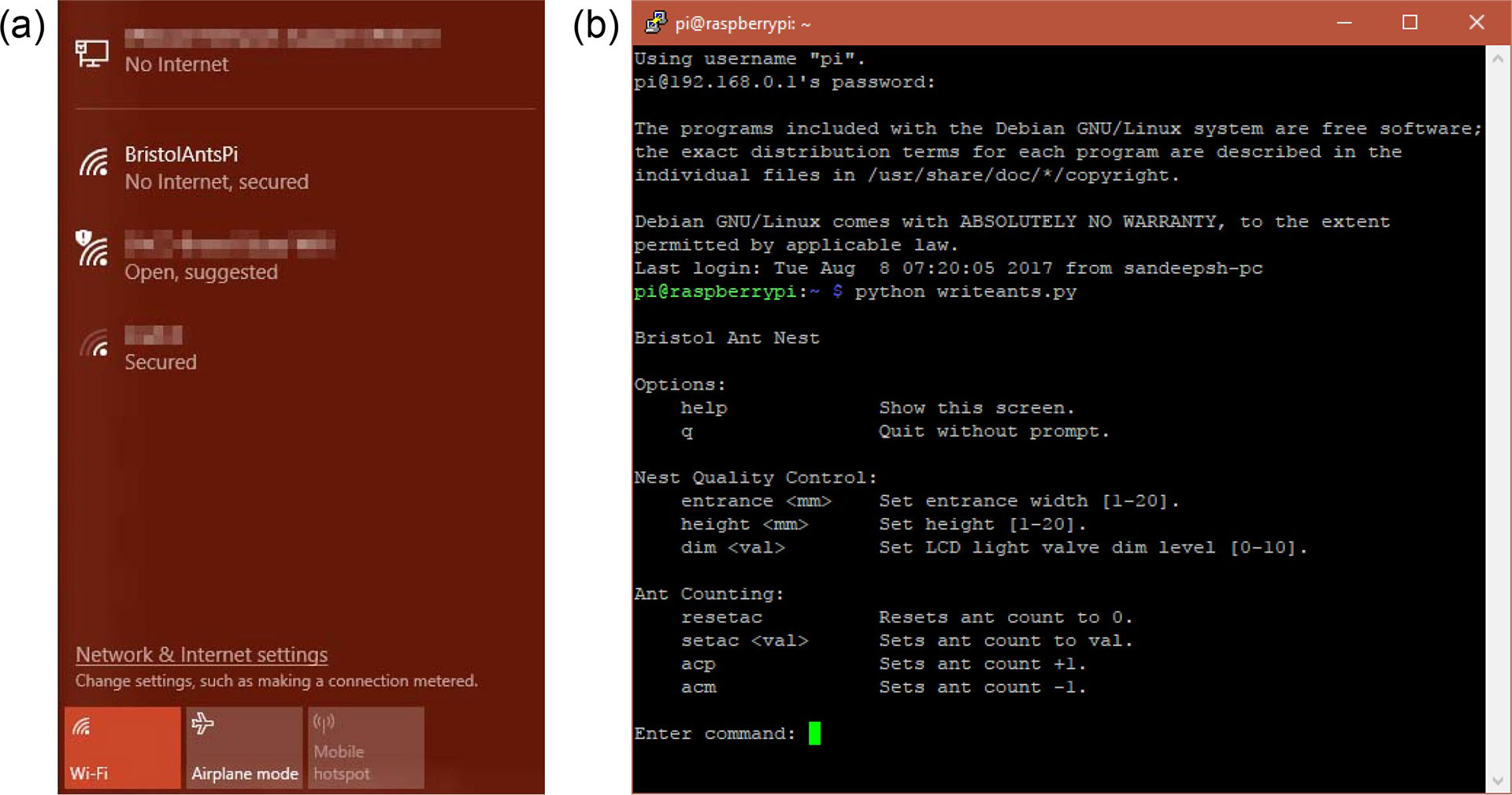
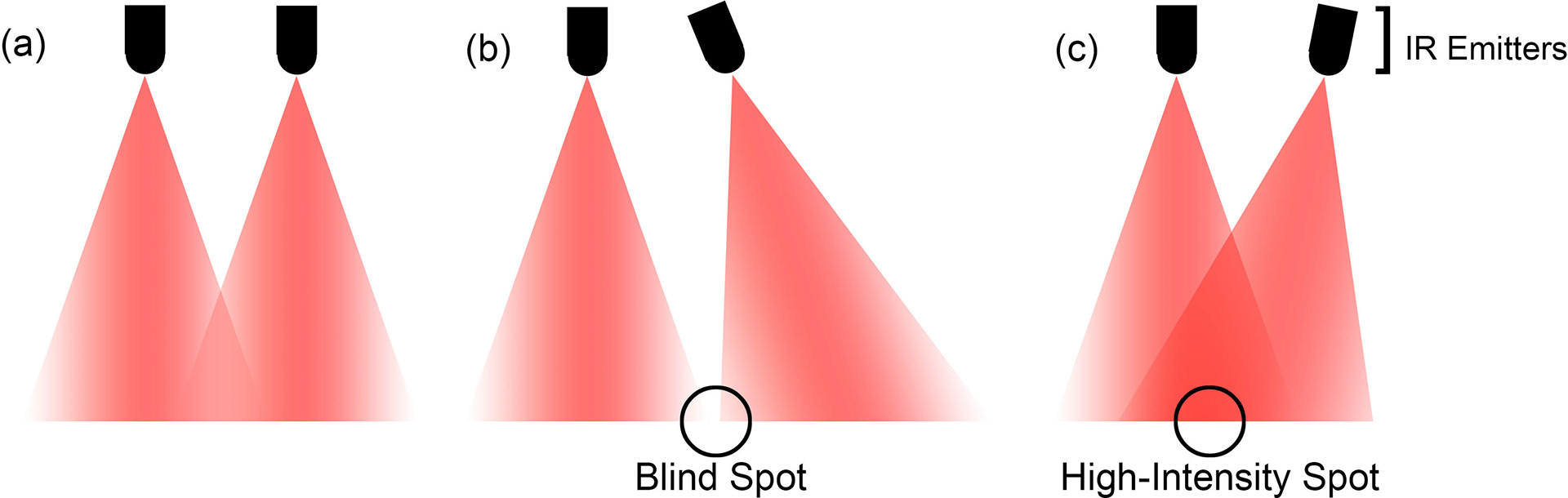
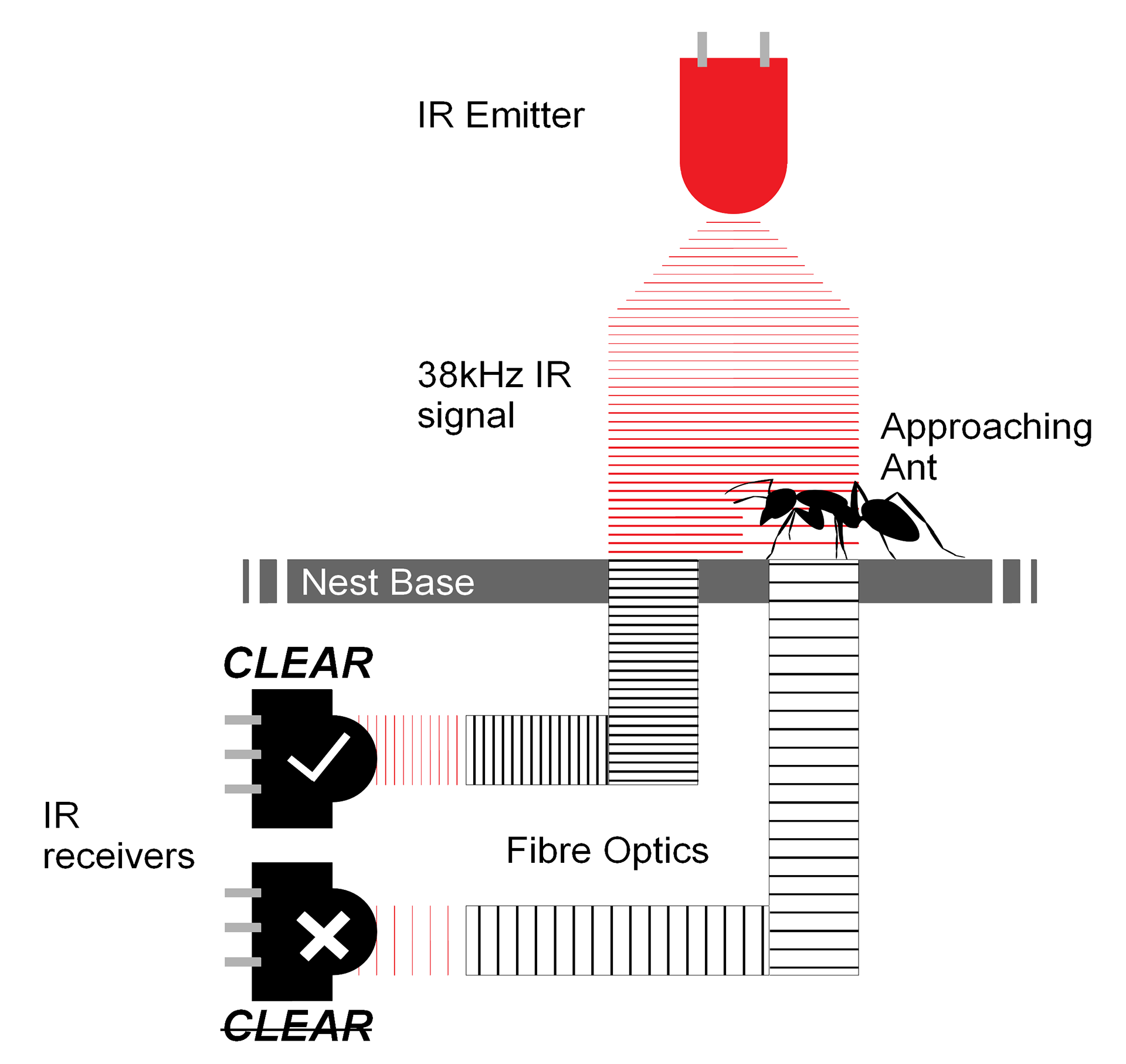
The final framework was a fully wireless device with two novel methods for detecting entrance and exit of small ants, involving capacitive sensing and IR(infrared) technology, as well as robotic control of internal nest dimensions and light intensity within the nest cavity.
The framework could be used to study the effect that changing the physical features of an ant's nest has on the behavior of ants on an individual and colony level, and how nest selection can be artificially influenced by humans.
Academic Poster Presented on 10/09/17 shortly before development had reached completion.